

김소리 (Sori Kim)
Current Research
Towards Automated As-Built BIM modeling from Mobile LiDAR with Semantic-Driven 3D Reconstruction
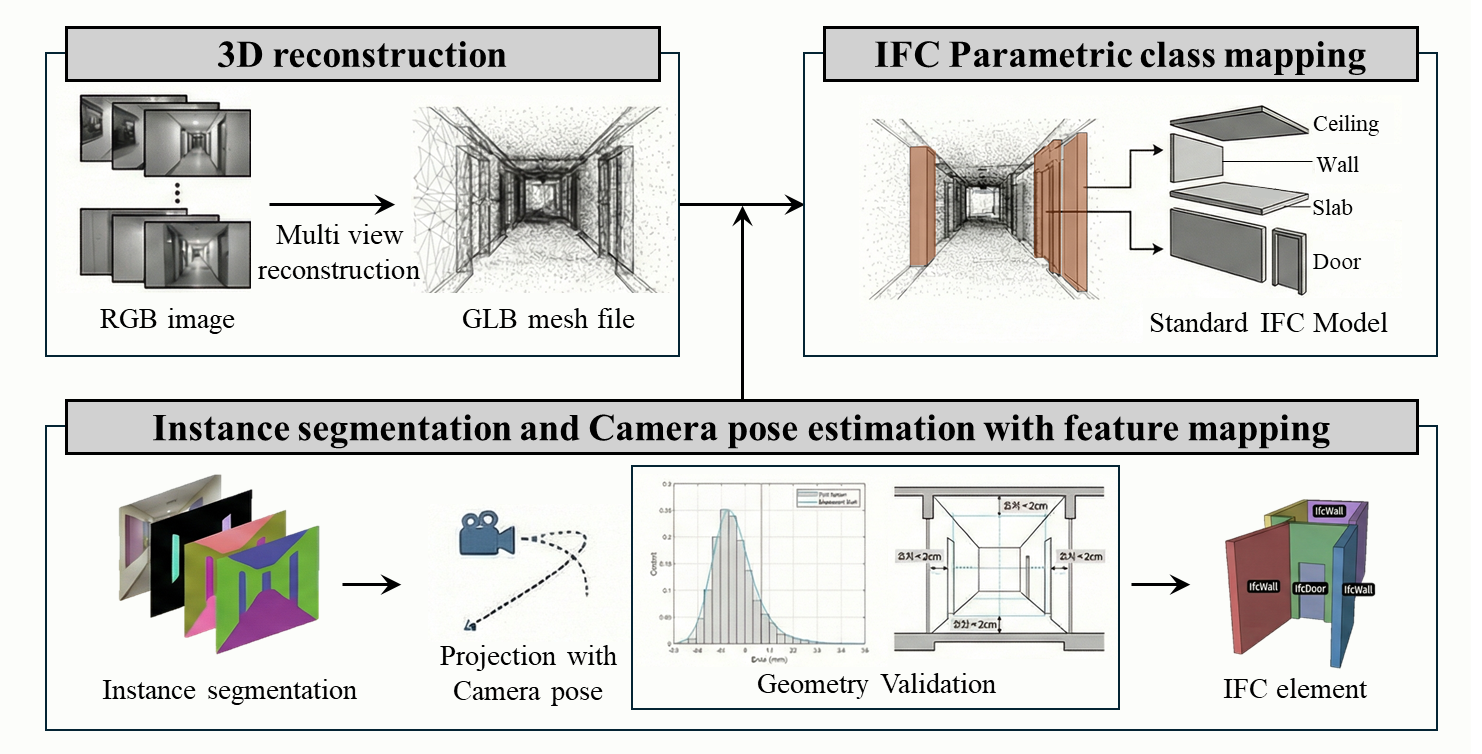
This study proposes an RGB-only, multi-view pipeline for corridor-scale as-built IFC generation, with explicit coupling between geometry reconstruction and semantic lifting. Multi-view RGB frames are first processed to estimate scene geometry and camera poses (with optional GLB export for visualization), and 2D instance masks are predicted per view. These masks are then fused into the reconstructed 3D surface through visibility-aware back-projection using calibrated camera parameters, yielding per-vertex class probabilities and multi-view semantic consistency constraints. The mesh is subsequently refined by a feature-guided constrained optimization that jointly minimizes reprojection and semantic inconsistency while enforcing corridor priors (wall parallelism, floor/ceiling orthogonality, and opening rectangularity).
The refined geometry is converted into IFC entities (IfcWall, IfcSlab, IfcCovering, IfcOpeningElement, IfcDoor) with explicit void/fill relationships compliant with IFC semantics. For evaluation, reconstructed scenes are aligned to Revit-derived references via Sim(3)-based registration with multiple metric anchors, and assessed using geometric distances (Chamfer/Hausdorff/F-score), reprojection error, and element-level parameter errors. The contribution is positioned as a low-cost and reproducible complement to scan-heavy workflows for corridor as-built modeling, rather than a universal replacement of LiDAR/TLS.