

이하영(Hayeong Lee)
Current Research
Indoor UAV localization using IFC-BIM graph matching based on RGB images
Indoor UAV localization is essential to repeatedly acquire high-precision inspection data under consistent spatiotemporal conditions in environments where GPS signals are weak or unavailable. Yet many conventional solutions depend on LiDAR, UWB, or marker-based infrastructure, which introduces significant weight, power, and cost overhead and is therefore difficult to deploy on UAV platforms constrained by size, weight, and power(SWaP).
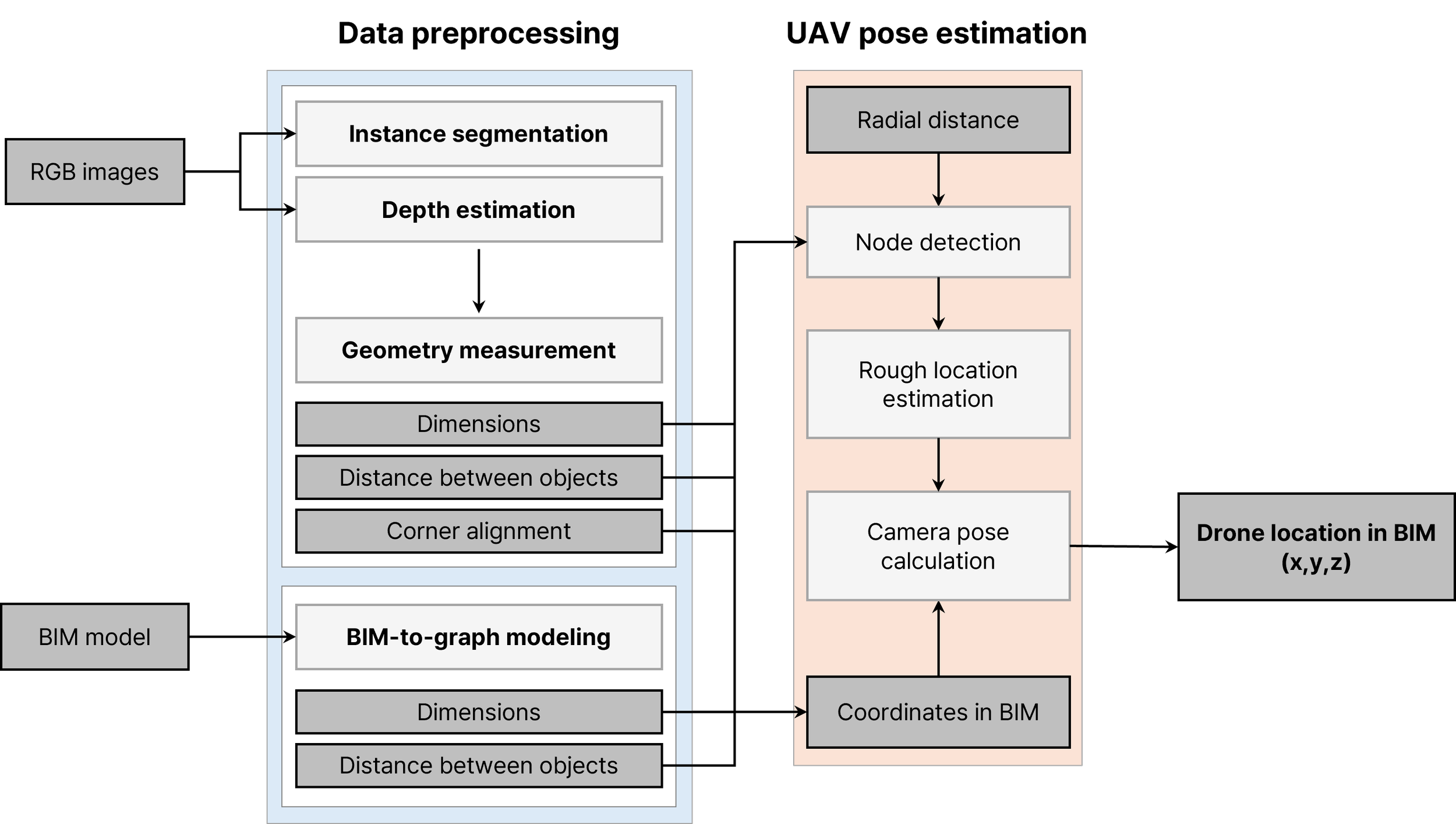
To overcome these limitations, a monocular RGB–based localization framework is presented. First, Indoor objects such as doors, windows, and columns are segmented via SAM3, after which depth is estimated using Depth Anything 3 to derive geometric attributes (e.g., object width and height). An IFC-BIM model is then transformed into a graph database that encodes spatial–object relationships (e.g., LOCATED_IN, CONNECTED_TO) and geometric properties as nodes and edges. The geometric attributes extracted from images are matched to candidate entities in the BIM graph under graph-based constraints to identify the most plausible correspondence. Finally, the UAV pose is estimated through PnP-RANSAC using 2D–3D corner correspondences of the selected object.
This approach enables indoor pose estimation using only an RGB camera without additional infrastructure, supporting digital-twin–based inspection, BIM updating, and monitoring of hard-to-access areas, while improving the repeatability and practical operability of indoor UAV inspections.